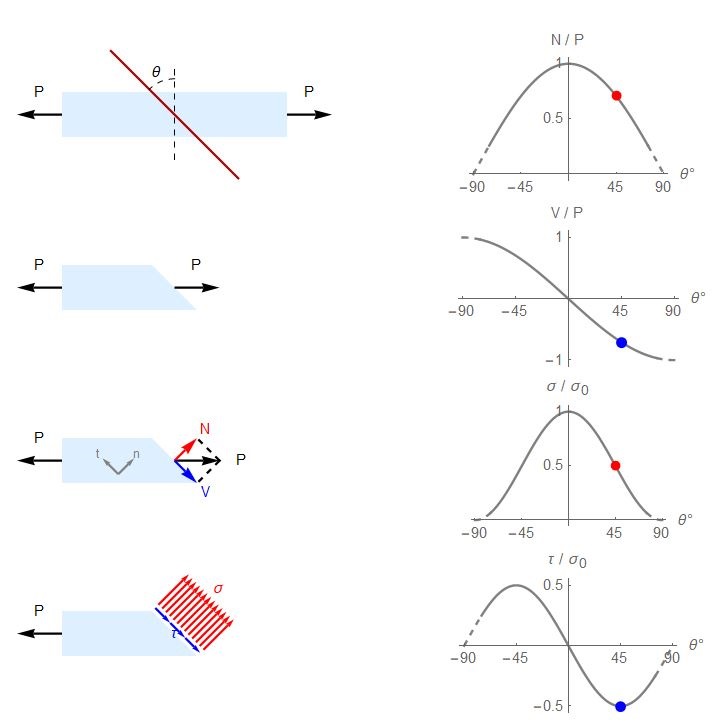
This module is designed to show the stresses on an oblique plane with inclined angle $\theta$ under
axial loading.
Consider a rectangular bar with constant cross section shown below, which is subjected to the axial
force P. Now, consider an oblique plane that passes through the bar and is inclined at the angle
$\theta$ relative to the vertical axis. What will be the forces and stresses acting on this oblique
plane? We will follow the following three steps in addressing this question.
Step 1: Using the method of sections we determine that the force acting on the inclined plane should
be
P to ensure horizontal equilibrium.
Step 2: We resolve P into two components, normal force N which is perpendicular to the inclined plane
and shear force V which is parallel to the inclined plane.
Step 3: We use the definition of the normal and shear stress, $\sigma$ = $\frac{N}{A_{\theta}}$ and
$\tau$ = $\frac{V}{A_{\theta}}$, to calculate these stresses noting that the area of the inclined
plane
is related to the area perpendicular to the x-axis by $A_{\theta}$ = $\frac{A_{0}}{cos\theta}$.
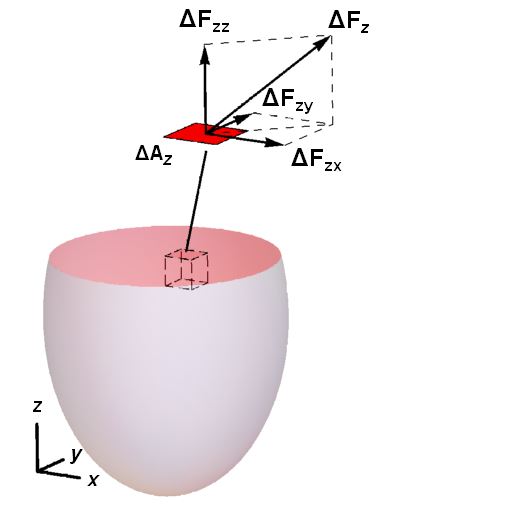
Stress at a Point
The following module demonstrate the concept of stress at a point.
Consider a body applied with traction (or displacement) on the boundary. To investigate the stress of a point inside, cut the body with a plane. Without losing generality, choose the plane perpendicular to z-axis. Consider a small area on the plane with size $\Delta$$A_z$, acted with a force $\Delta$$F_z$ which has components of $\Delta$$F_{zx}$, $\Delta$$F_{zy}$, $\Delta$$F_{zz}$. Then the stresses can be defined as
\begin{equation}
\tau_{zx} = lim_{\Delta A_{z} \rightarrow 0} \:\: \frac{\Delta F_{zx}}{\Delta A_{z}}
\end{equation}
\begin{equation}
\tau_{zy} = lim_{\Delta A_{z} \rightarrow 0} \:\: \frac{\Delta F_{zy}}{\Delta A_{z}}
\end{equation}
\begin{equation}
\sigma_{zz} = lim_{\Delta A_{z} \rightarrow 0} \:\: \frac{\Delta F_{zz}}{\Delta A_{z}}
\end{equation}
The general state of stress at this point can be obtained if we take a stress cube out and look at the stress at the remaining surfaces.
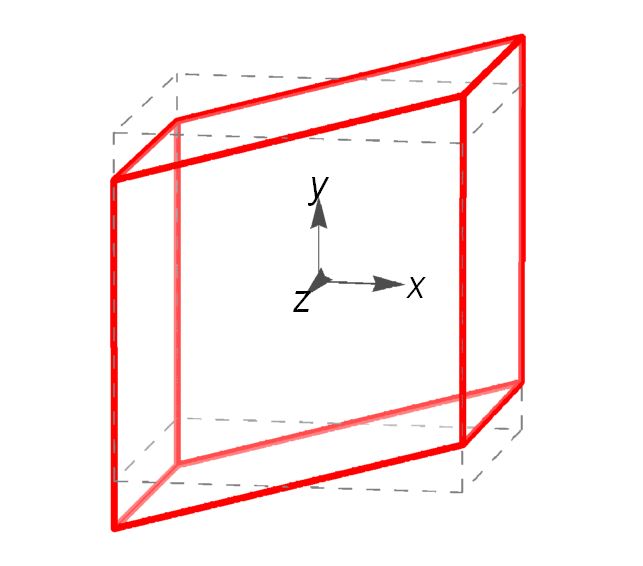
Strain
This module presents the definition of strain.
Strains are measures of deformation represented by displacements between particles in the body
relative
to a reference configuration. They are classified as either normal or shear. Normal strains represent
changes in lengths of line elements oriented along the three axes associated with an infinitesimal
cube
and hence are perpendicular to the cube's faces. Therefore they also represent volumetric changes.
Shear
strains represent changes in the angles of mutually orthogonal line elements in the three planes x-y,
y-z and x-z of an infinitesimal cube. Therefore they also represent cube's distortion.
There are three normal strains and six shear strains, but only three of the six shear strains are
independent because shear strains are symmetric. These strains comprise the three-dimensional strain
tensor in analogy with the stress tensor and may be represented using the same matrix notation.
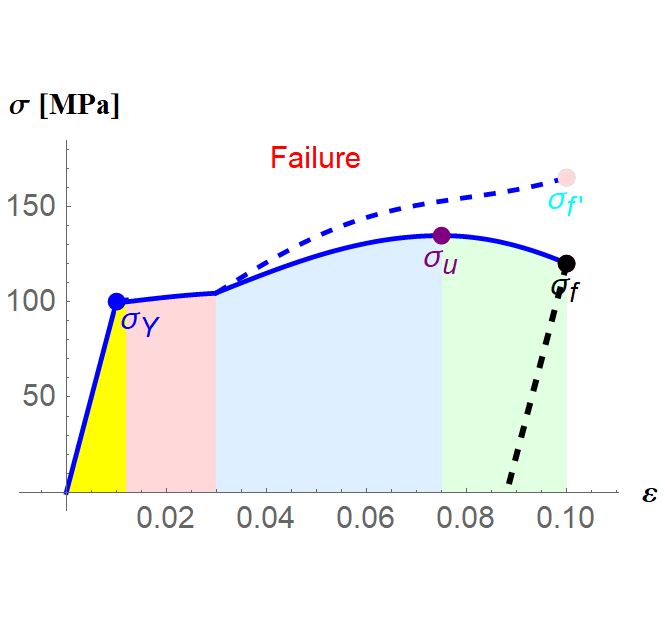
Tensile Test
The strength of a material depends on its ability to sustain a load without undue deformation or
failure. This property is inherent in the material itself and must be determined by
$\textbf{experiment}$. One of the most important tests to perform in this regard is the
$\textbf{tensile test}$. It is primarily to determine the relationship between the average $\textbf{normal stress}$ and
average $\textbf{normal strain}$.
We can determine the nominal or engineering stress by dividing the applied load P by the specimen's
original cross-sectional area $A_{0}$. This calculation assumes that the stress is constant over the
cross section and throughout the gauge length. We have
\begin{equation}
\sigma = \frac{p}{A_{0}}
\end{equation}
Likewise, the nominal or engineering strain is found directly from the strain gauge reading, or by
dividing the change in the specimen's gauge length, $\delta$ , by the specimen's original gauge length
$L_{0}$. Here the strain is assumed to be constant throughout the region between the gauge points.
Thus
\begin{equation}
\epsilon = \frac{\delta}{L_{0}}
\end{equation}
If the corresponding values of $\sigma$ and $\epsilon$ are plotted so that the vertical axis is the
stress and the horizontal axis is the strain, the resulting curve is called a $\textbf{conventional}$
stress-strain diagram.
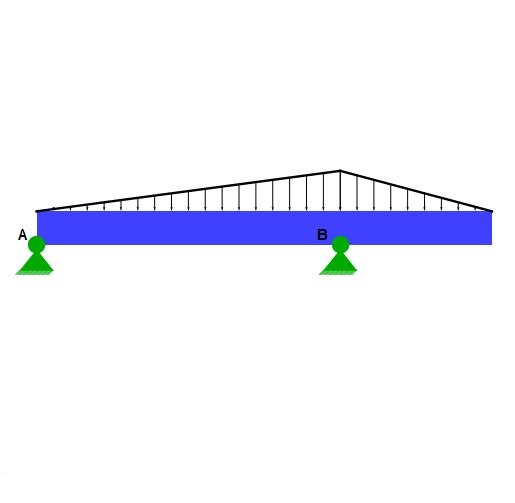
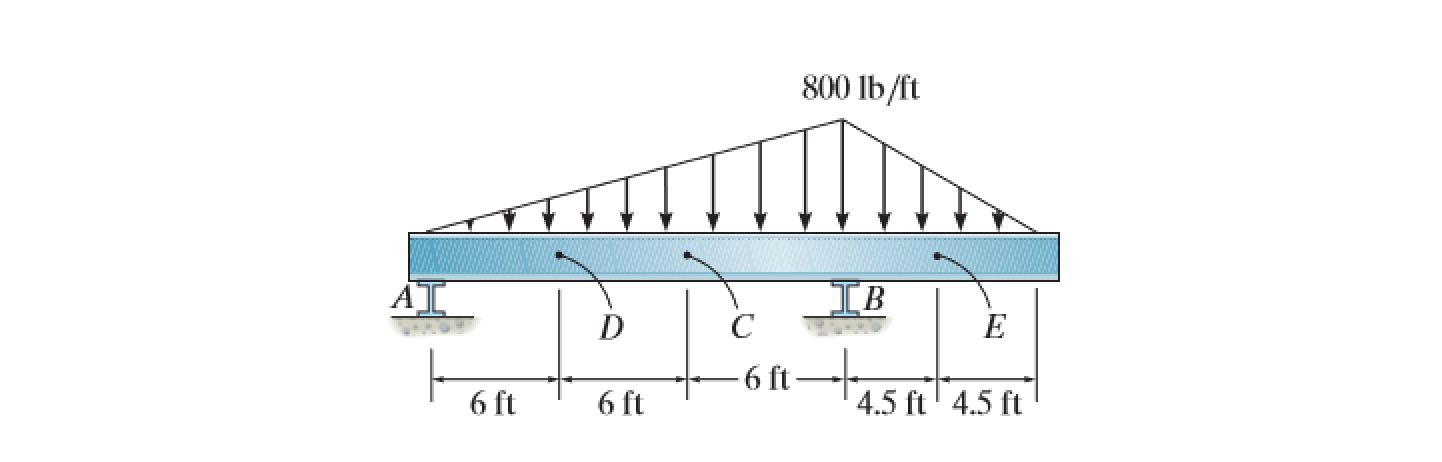
Internal Shear and Moment Diagram
The following module expands on the topic of two-dimensional FBD diagrams, the method of sections, and internal forces and moments covered previously in Statics. The module illustrates homework problem 16 in chapter 1 of the 10th edition of Hibbeler's Mechanics of Materials.
As illustrated above, a supported beam has two pin supports: one at point A and one at point B. Although different from the typical beam setup of one roller and one pin, the internal normal force is not affected. Solving for the support reactions at A and B, it is found that the two exert a horizontal reaction force. Since there is not horizontal external force or loading, the internal forces in the horizontal direction is neglected. Additionally the textbook problem assumes the reaction supports are vertical.
The problem itself asks for internal forces and moments at D and E; however, the module shows forces and moments at all points of the beam. Using method of sections, shear and moment equations can be found for a particular section varying with the chosen position along the beam (where x = 0 is at point A). The shape of the distributed loading must be noted. A common rectangular distributed loading would produce a shear diagram of the first order (linear) and thus a moment diagram of the second order (quadratic). Since this shape is that of a triangle, the shear now becomes a second order function.
The following module calculates and graphs shear and moment, and allows for the magnitude of the distributed loading peak, location of the peak and the location of support reaction B to be changed.
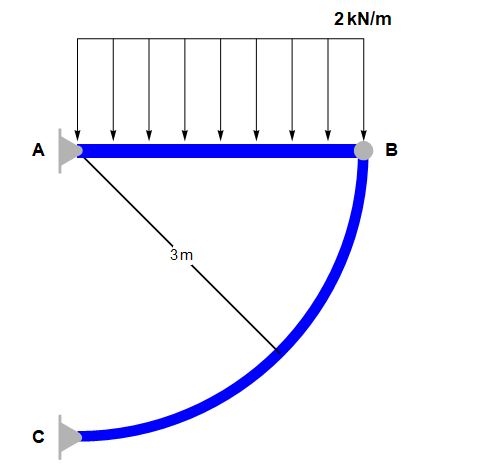
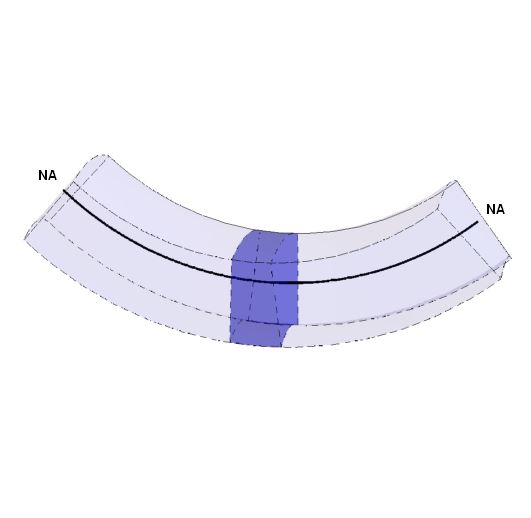
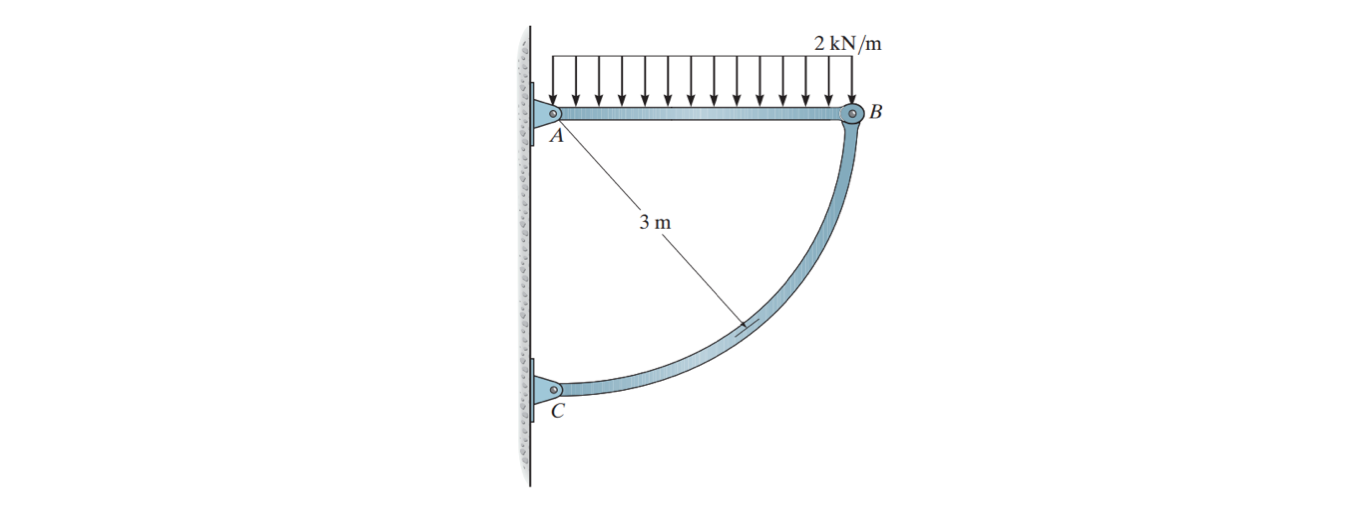
Pin Diameter Determination
The following module aims at solving homework problem 1-81 in Strength of Material. Problem 1-81 asks for the required diameter of the pins at A and B given that the allowable shear stress for the material is $\tau_{allow}$ = 100 MPa. Both pins are subjected to double shear. Two types of force distributions are allowed to be chosen, equally distributed and triangularly distributed. The radius of arc BC is set to be same as the member AB, i.e. frame ABC is a quarter circle. The magnitude and position of load is changeable. Free body diagrams of member AB and Pin A are shown on the side.
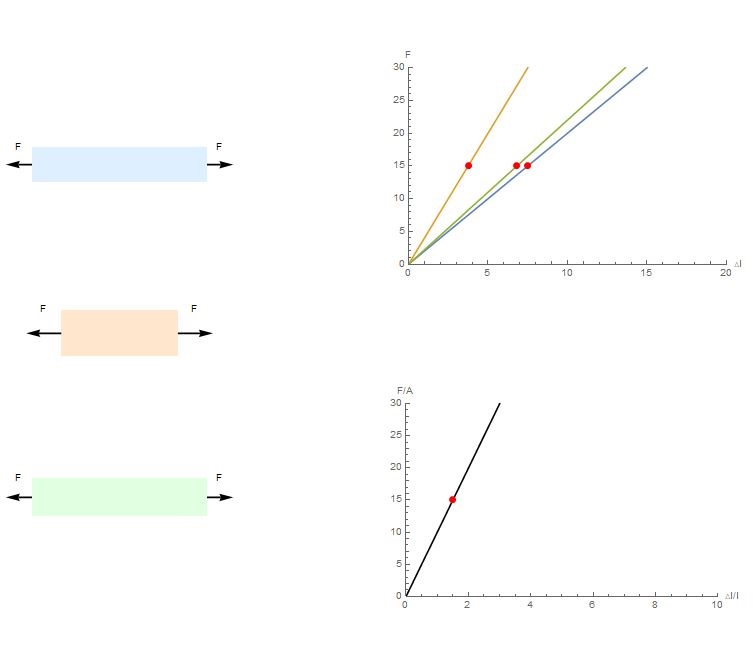
Mechanical Properties of Materials
Mechanical Properties of Materials - Chapter 3.1 to 3.4
The first diagram depicts the control force bar. The second second depicts how length affects the
total
change in length when a force is applied. The third diagram depicts how a change in area affects the
total change in length when a force is applied.
The first graph shows the three diagrams of when a force is applied. The equation is $\delta$l =
$\frac{Fl}{AE}$
The second graph depicts $\sigma$ = Ee.
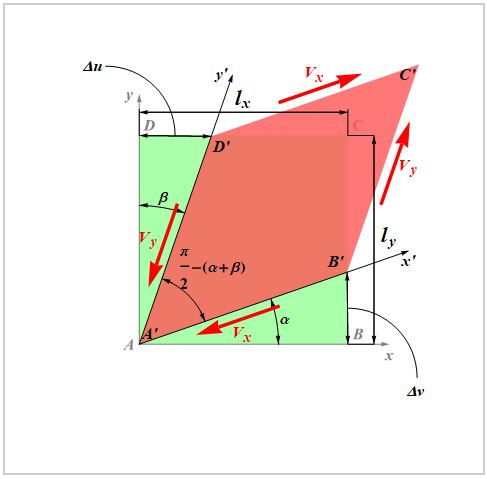
Stress-Strain Relations
This module is a slight modification of the module "Cauchy And Engineering Strain Deformation In 3D"
available on the Mathematica Demonstrations website.
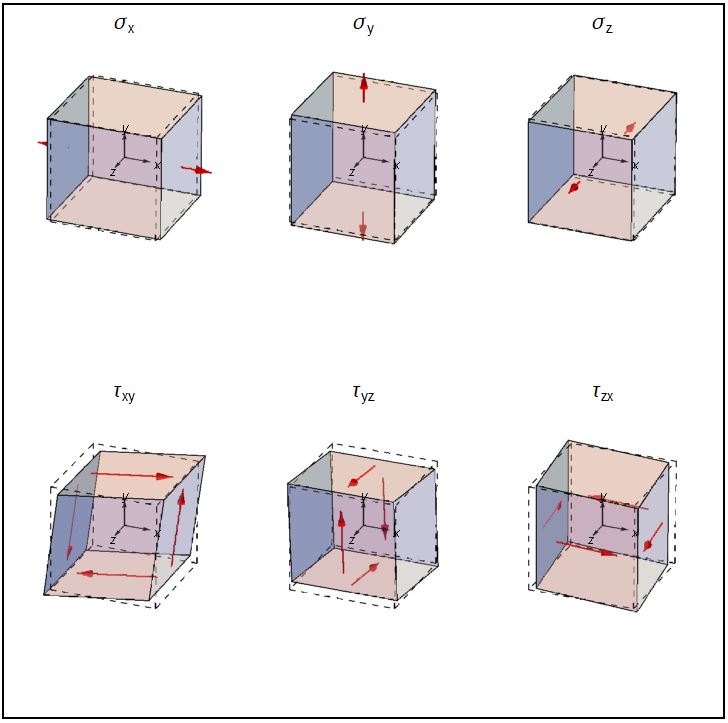
This module demonstrates the deformations and strains that arise in an infinitesimal cubical element
of
a material due to the application of single or combined stresses. The stresses applied cause a
deformation of the cube that depend on the magnitude of the material properties (Young's Modulus: E
and
Poisson's Ratio: v). All stresses and resulting strains are shown in tensorial form below on the left
side of the box, while the deformation of the cube is shown on the right.
Adjust the sliders to change the stress components applied to the cube. The "reset view" button
returns
the cube to its default orientation. The "reset stress" button returns all stresses to zero. You can
rotate the view of the cube by clicking and dragging on the cube. The matrices represent the stress
and
strain tensor components acting on the cube. The controls at the bottom adjust the view of the cube.
Positive stresses indicate tension and the resulting positive strains are elongation.
Principles of Stress Superposition
This module is designed to demonstrate the superposition of deformation or strain of a cube in 3D.
The principle of superposition is often used to determine the stress, strain or displacement of a
point in a cube when the cube is subjected to a complicated loading. By subdividing the loading into
components, the principle of superposition states that the resultant stress, strain or displacement at
a point can be determined by algebraically summing the stress, strain or displacement caused by each
component applied separately to the cube.
In the present module, complex stress loading can be applied on the cube. However, the stress can be
divided into six components, and we can calculate the strain of cube under each stress component. Then
the total strain will be the sum of these six strain.
This principle will be used whenever the Hooke's law applies, which means there is a linear relation
between stress and strain. Also, the small deformation assumption needs to be hold as a prerequisite,
which means the loading must not significantly change the original geometry or configuration of the
member. In order to see the deformation clearly, we set a variable "deformation scaling" to enlarge
the deformation shown on the figure while do not change the actual strain value.
Thermal Stress
A change in temperature can cause a body to change its dimensions. For homogeneous and isotropic
materials with its expansion or contraction linearly related to the temperature increase or decrease,
the displacement can be calculated using the formula $\delta_{T}$ = $\alpha\Delta TL$, where
$\delta_{T}$ is the algebraic change in length, $\alpha$ is the linear coefficient of thermal
expansion, $\Delta$T is the algebraic change in temperature and L is the original length.
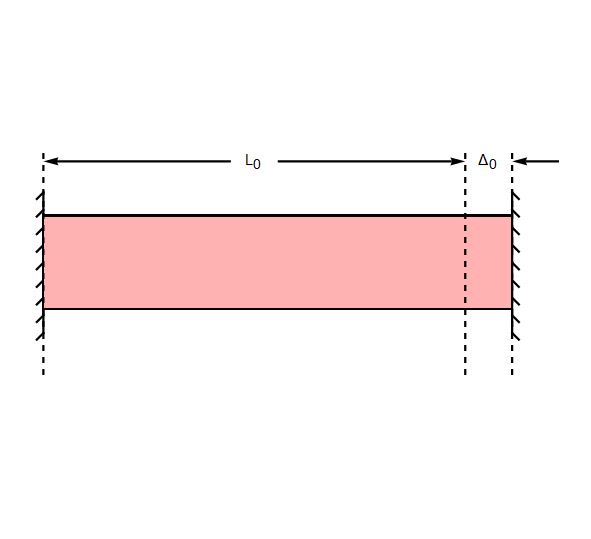
In the present case, a member with original length $L_{0}$ is fixed on the left and free on the right,
with a distance $\Delta_{0}$ to the right wall. When temperature is increased, the end on the right
will expand, but no thermal stress will be produced until its reaches the wall. After touching with
the wall, and continuously increase the temperature, then thermal stress will be produced. Think about
how to calculate the thermal stress, and click on "Superposition" and "Calculation" for checking.
Torsion
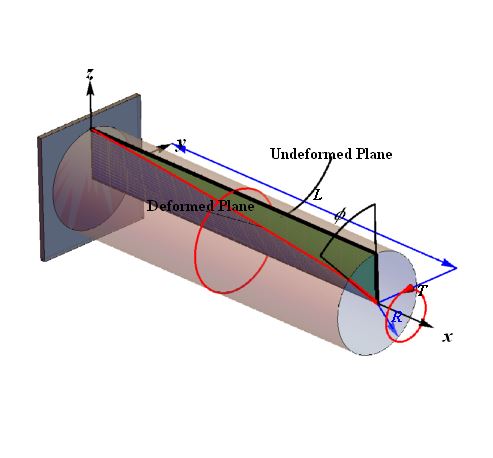
Consider a shaft to be rigidly attached at one end and twisted at the other end by a torque
$\textbf{T}$, which is applied perpendicular to the axis of the shaft. Such a shaft is said to be in
torsion.
For a solid shaft subject to a torque $\textbf{T}$, the torsional shearing stress, $\textbf{$\tau$}$,
at a distance, $\textbf{$\rho$}$, from the center of the shaft is
\begin{equation}
\tau = \frac{T\rho}{J}
\end{equation}
\begin{equation}
\tau_{max} = \frac{Tr}{J}
\end{equation}
where J is the polar moment of inertia of the section and r is the outer radius.
The angle $\Phi$ through which the shaft length $\textbf{L}$ will twist is
\begin{equation}
\Phi = \frac{TL}{JG}
\end{equation}
where $\textbf{G}$ is the shear modulus of the shaft.
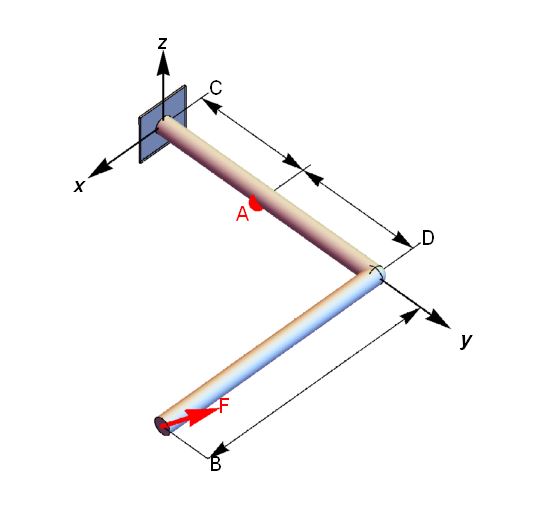
Shear Stress from Torque
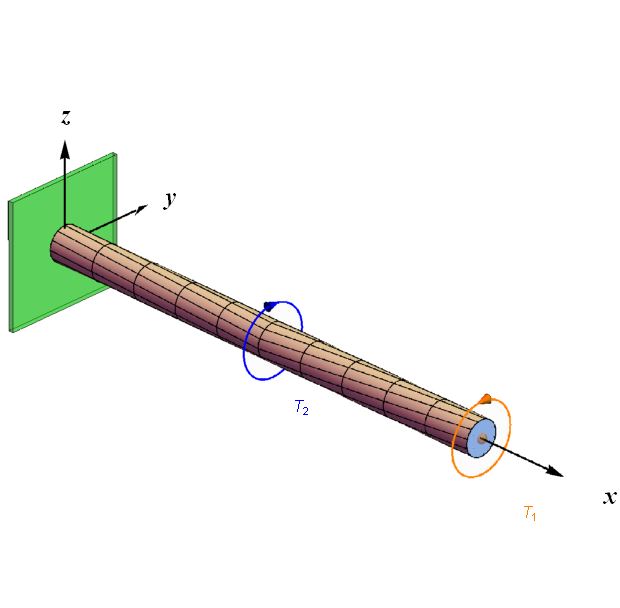
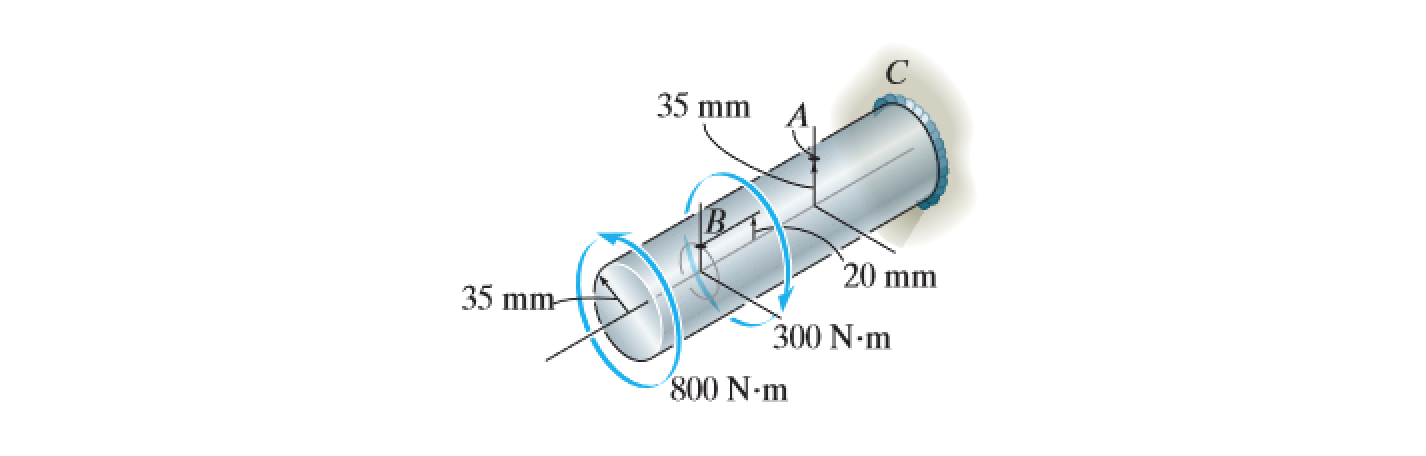
The following module discusses the topics of shear stress from applied torques and the angle of twist. The module illustrates homework problem 9 in chapter 5 of the 10th edition of Hibbeler's Mechanics of Materials.
As illustrated above, a cylindrical rod is subjected to two torques of varying direction and torque. The problem specifically asks for the shear stresses at points A and B. Please note that while point A lies on the outside surface of the rod, point B lies 20 mm from the center of the shaft. Similar to normal stresses and beams under transverse loads, torque problems require the computation of the internal torque to find the stresses at the desired area. The module follows the sign convention outlined in Hibbeler (pg. 209 of the 10th edition).
\begin{equation}
\tau = \frac{T \rho}{J}
\end{equation}
\begin{equation}
\tau_{max} = \frac{T r}{J}
\end{equation}
In addition to shear stress, the angle of twist has been included as a feature. To calculate the angle of twist at an end of a rod that is subject to multiple torques, the angle of twist formula will be applied to each section of uniform torque and then added up to get the total angle of twist. Again, this runs analogous to the calculations of deformations in beams. While the length of the beam was not given in the problem, an arbitrary range of 0 to 1 m has been given.
\begin{equation}
\phi = \frac{TL}{JG}
\end{equation}
The following module allows for the magnitude and position of the two applied torques to be changed along with the radius, length, and shear modulus (G). It calculates the shear stress at a certain position that can be changed longitudinally (x-axis) and radially as well as the angle of twist. The mesh and volume element may be viewed. Note that although the red section point may be rotated about the x-axis, this does not change the value of the internal shear stress value. Only translating the point radially on the yz plane will affect the shear stress.
Stress on Over-Constrained Bar
Consider two shafts bounded by two rigid walls. A uniform force or torque is applied on the interface between two shafts, and thus results in an axial deformation or twisting of shafts. When force is applied, equation E = $\frac{\sigma}{\epsilon}$ is used to solve for reaction force applied from walls to shafts, where E is the young's modulus, $\sigma$ is the stress, $\epsilon$ is the strain. Since the summation of deformation of two shafts must be 0 (as two walls are rigid), $\epsilon_{Left}$ + $\epsilon_{Right}$ = 0. Also, the summation of two reaction forces from walls must equals to F, the force applied, since the system is in equilibrium condition.
Solving these two equations simultaneously gives the numerical solution of two reaction forces, $F_1$ and $F_2$.
Similar procedure can be taken to solve for the torques applied from walls to shafts when a torque is applied to the interface between two shafts. Equation $\varphi$ = $\frac{TL}{GJ}$ and T = $T_1$ + $T_2$ are used instead, where $\varphi$ is the twisting angle of the shaft, T is the torque, L is the length, G is the shear modulus, J is the polar moment of inertia of the cross section area.
Bending
The following module demonstrates the deformation of a bar section caused by pure bending moment.
Consider a section of bar with square cross section that is marked with longitudinal and transverse grid lines. When a pure bending moment is applied, the bar will deform in a way shown in the following module. The neutral plane or neutral axis will not undergo any deformation in the longitudinal direction. When a positive moment is applied, the longitudinal line above the neutral axis and below the neutral axis will undergo a extension and compression separately, vice versa for a negative moment. The transverse line which is originally vertical to the neutral axis will keep to be vertical after deformation.
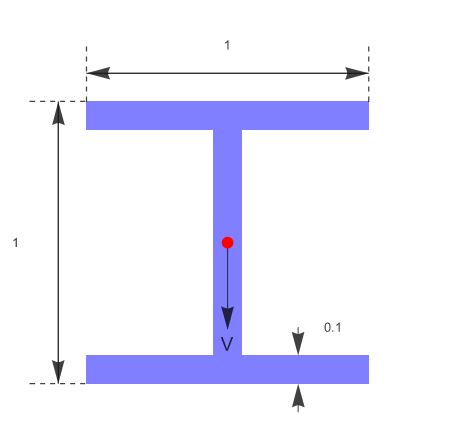
Shear Flow of a Section
Shear stress in a member can be determined with shear formula, $\tau = \frac{VQ}{It}$, where V is the shear force applied on the section, Q = y̅'A', where A' is the area of the top (or bottom) portion of the member's cross section, above (or below) the section plane where t is measured, and y̅' is the distance from the neutral axis to the centroid of A', I is the moment of inertia of the entire cross section, t is the thickness of the cross section at the point where tau is measured.
In this module, four composite sections are presented with height, width, and thickness changeable. For the first three sections, thickness is assumed to be uniform. For the hollow circle, height is the outer diameter and thickness is the inner diameter. For each of them, shear force V is assumed to be applied to the negative y direction, i.g. downward, on the whole cross-section simultaneously. With the red A-A plane moving either horizontally or vertically, the distribution of shear stress $\tau_{xz}$ will be plotted.
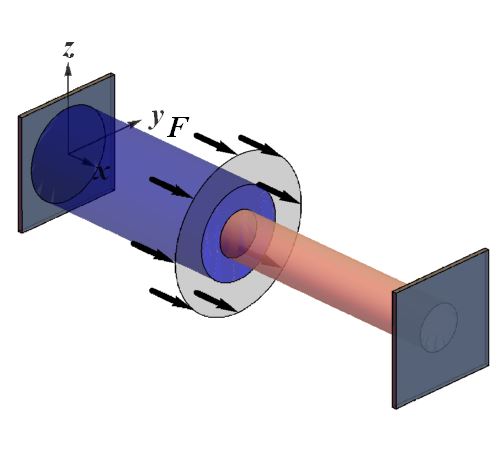
Combined Loadings
The solid rod shown below is fixed on the wall at one end and applied with a force at the other end.
The module is designed to show how to determine the internal loading and stress on a chosen section A.
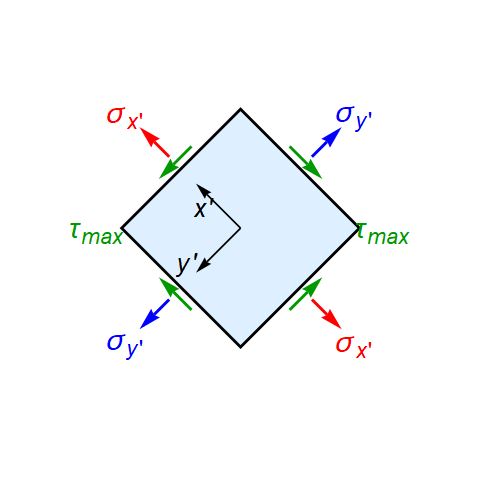
Stress Transformation
This module is revised on the basis of the prototype developed by Nick Bongiardina et al to show the
idea of stress transformation as well as Mohr's Circle for plane stress problem.
The state of plane stress at a point is uniquely represented by two normal stress components and one
shear stress component acting on an element. These three component will be different for each specific
orientation $\theta$ of the element at the point. Specifically, if the stress state for a given
element is known, with the two normal stresses and one shear stress represented by $\sigma_{x}$,
$\sigma_{y}$ and $\tau_{xy}$; after a rotation of an angle $\theta$, the stresses change to
$\sigma_{x^{'}}$, $\sigma_{y^{'}}$ and $\tau_{x^{'}y^{'}}$, and the relations between these two sets
of stress, or stress transformation equation can be written as
\begin{equation}
\sigma_{x^{'}} = \frac{\sigma_{x} + \sigma_{y}}{2} + \frac{\sigma_{x} - \sigma_{y}}{2}\cos(2\theta) +
\tau_{xy}\sin(2\theta)
\end{equation}
\begin{equation}
\sigma_{y^{'}} = \frac{\sigma_{x} + \sigma_{y}}{2} - \frac{\sigma_{x} - \sigma_{y}}{2}\cos(2\theta) -
\tau_{xy}\sin(2\theta)
\end{equation}
\begin{equation}
\tau_{x^{'}y^{'}} = - \frac{\sigma_{x} - \sigma_{y}}{2}\sin(2\theta) + \tau_{xy}\cos(2\theta)
\end{equation}
After eliminate the parameter $\theta$ we can get the following equation
\begin{equation}
(\sigma_{x^{'}}- \frac{\sigma_{x} + \sigma_{y}}{2})^{2} + (\tau_{x^{'}y^{'}})^{2} = (\frac{\sigma_{x}
- \sigma_{y}}{2})^{2} + (\tau_{xy})^{2}
\end{equation}
Which is the equation of Mohr's Circle for plane stress problem. Once we set the stress of
$\sigma_{x}$, $\sigma_{y}$ and $\tau_{xy}$ at 0 degree, the Mohr's Circle can be drawn in the
$\sigma_{x^{'}}$ - $\tau_{x^{'}y^{'}}$ plane, and the point represent 0 degree can be determined.
Then, according to the stress transformation equation, we can easily determine the stress for the same
element with an orientation of angle $\theta$.
The following module is used to show such process. Give the stress at 0 degree first, and then give
the orientation angle $\theta$, see how the stress of the element change. Also see the stress plot for
the whole range of orientation.
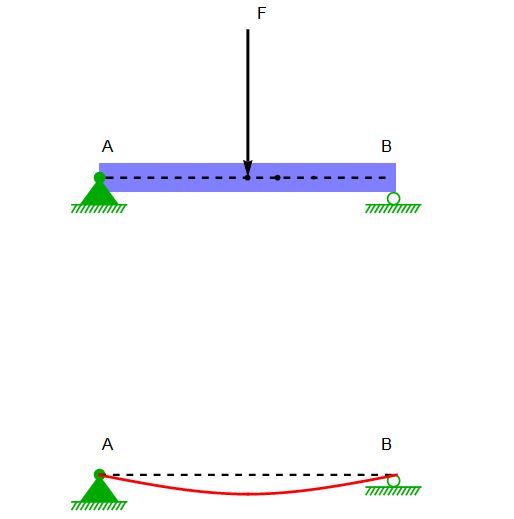
Beam Deflection
The module below shows how to determine the deflection of a beam. Two types of beam with two types of
cross sections are available. As an intermediate step, the internal force diagram is also provided for
the final determination of the deflection.
Project Name
Lorem ipsum dolor sit amet consectetur.
Use this area to describe your project. Lorem ipsum dolor sit amet, consectetur adipisicing elit. Est
blanditiis dolorem culpa incidunt minus dignissimos deserunt repellat aperiam quasi sunt officia
expedita beatae cupiditate,
maiores repudiandae, nostrum, reiciendis facere nemo!